Patents
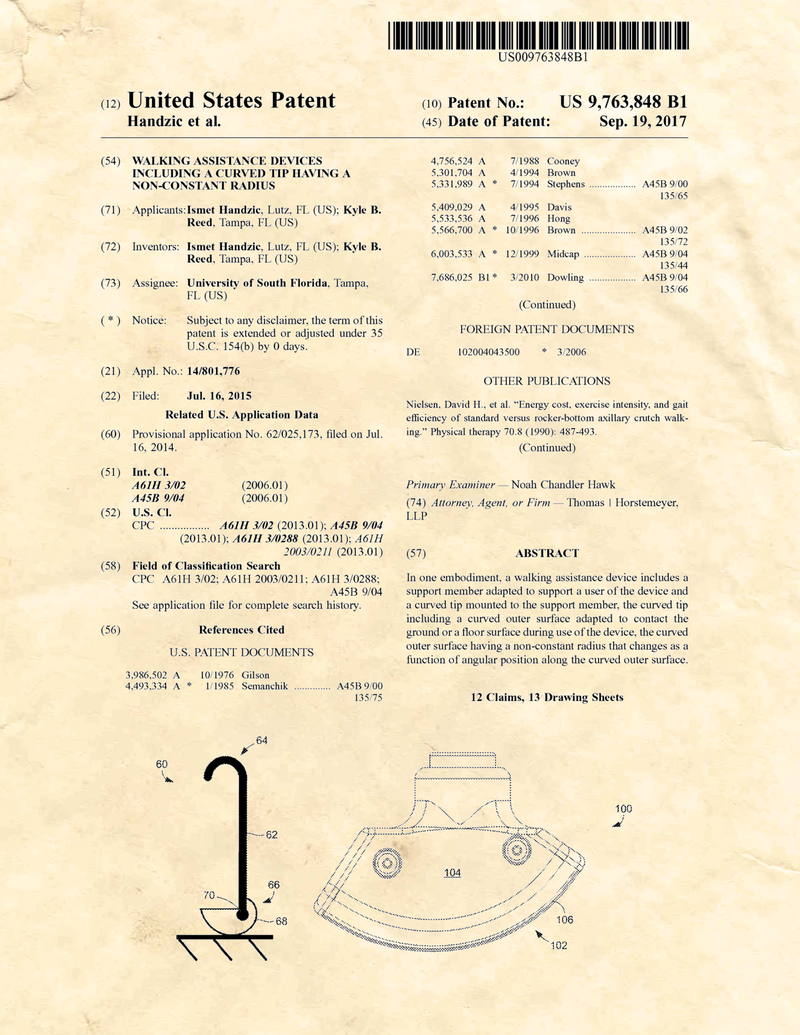
Walking Assistive Device Including a Curved Tip Having a Non-Constant Radius
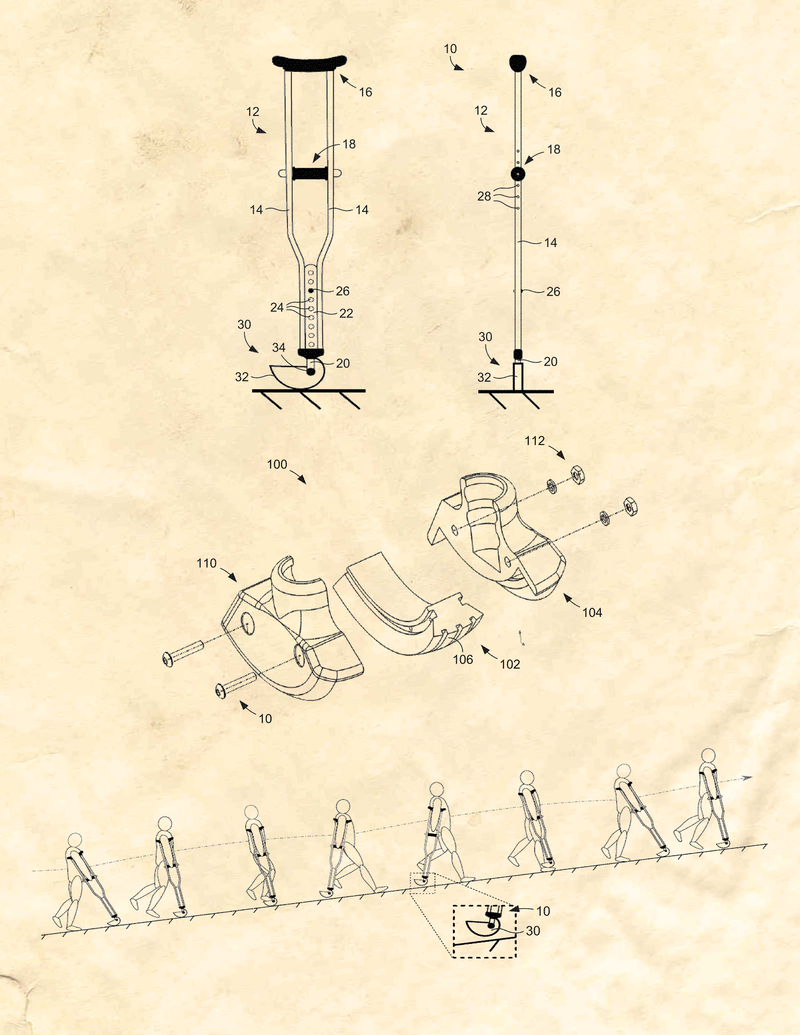
A crutch or cane with a kinetic shape roll-over tip. This crutch tip can generate controlled rolling assistance or resistance depending on the passive or active crutch/cane tip definition. This invention allows users to more efficiently propagate uphill or more decent down a decline in a controlled manor.
Basically: A more effective crutch tip.
Potential Applications: Assistive devices
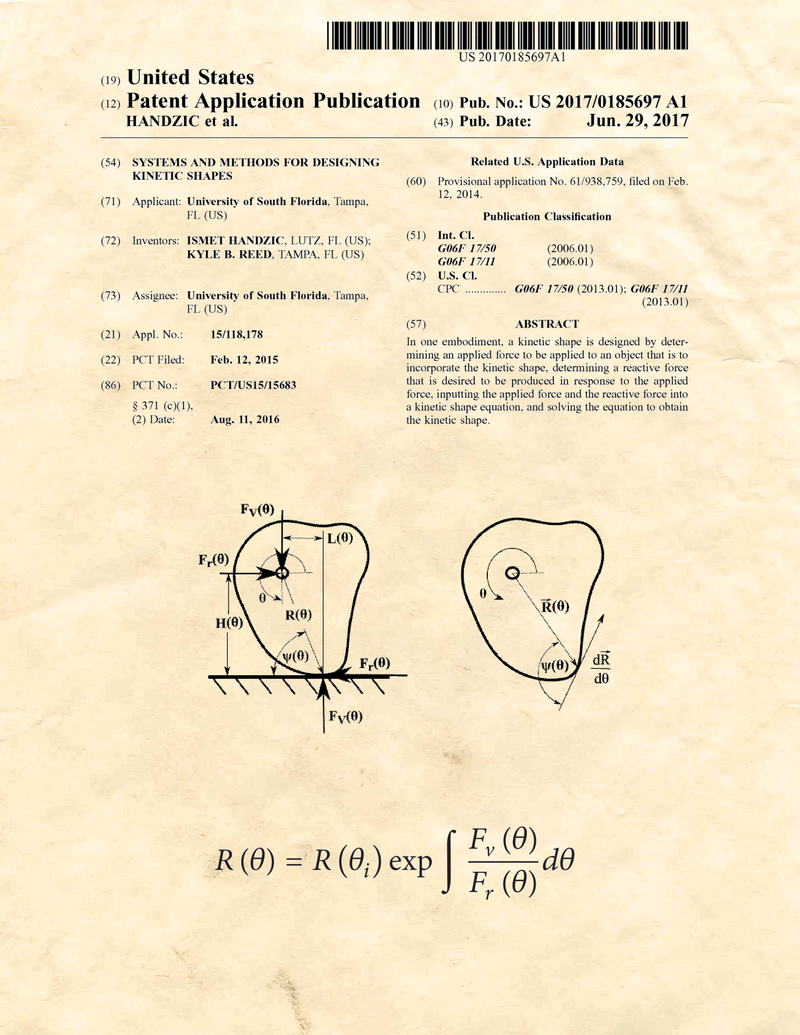
Systems and Methods for Designing Kinetic Shapes
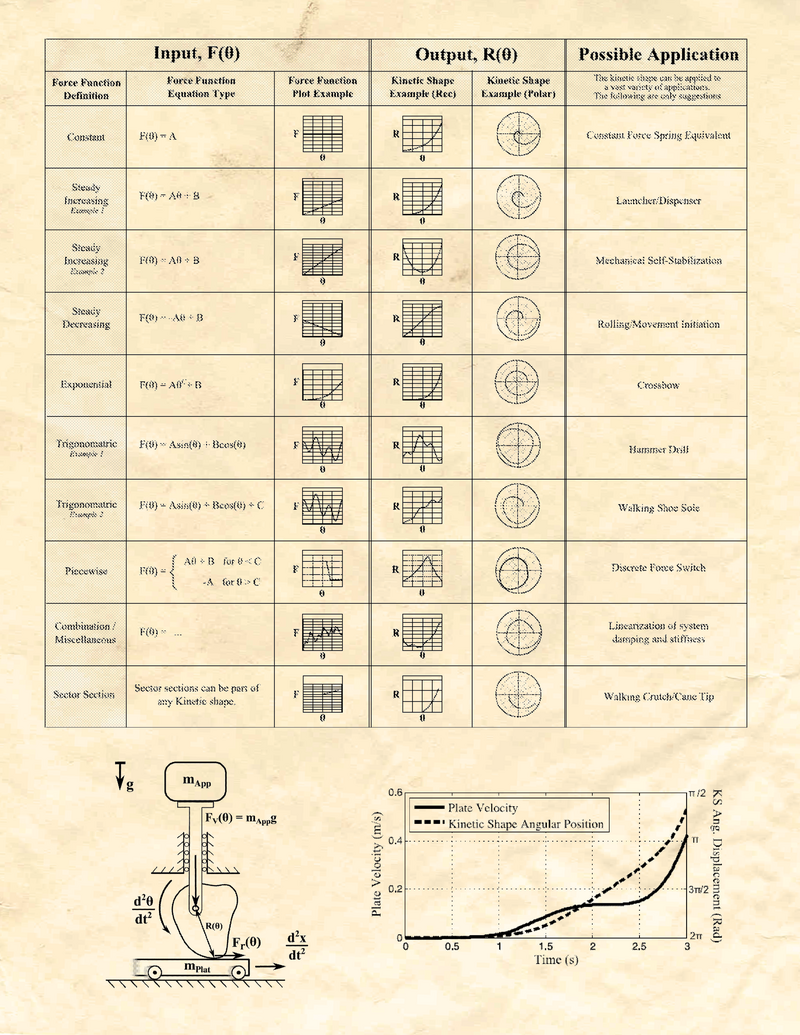
This invention describes the techniques to derive kinetic shapes. A kinetic shape is a physical 2D or 3D shape that is defined by its predicted ground reaction forces as it is pressed onto a flat surface.
Basically: A method to make shapes that react with known forces
Potential Applications: Robotics, walking control, mechanical math, mechanical propultion, musical instruments
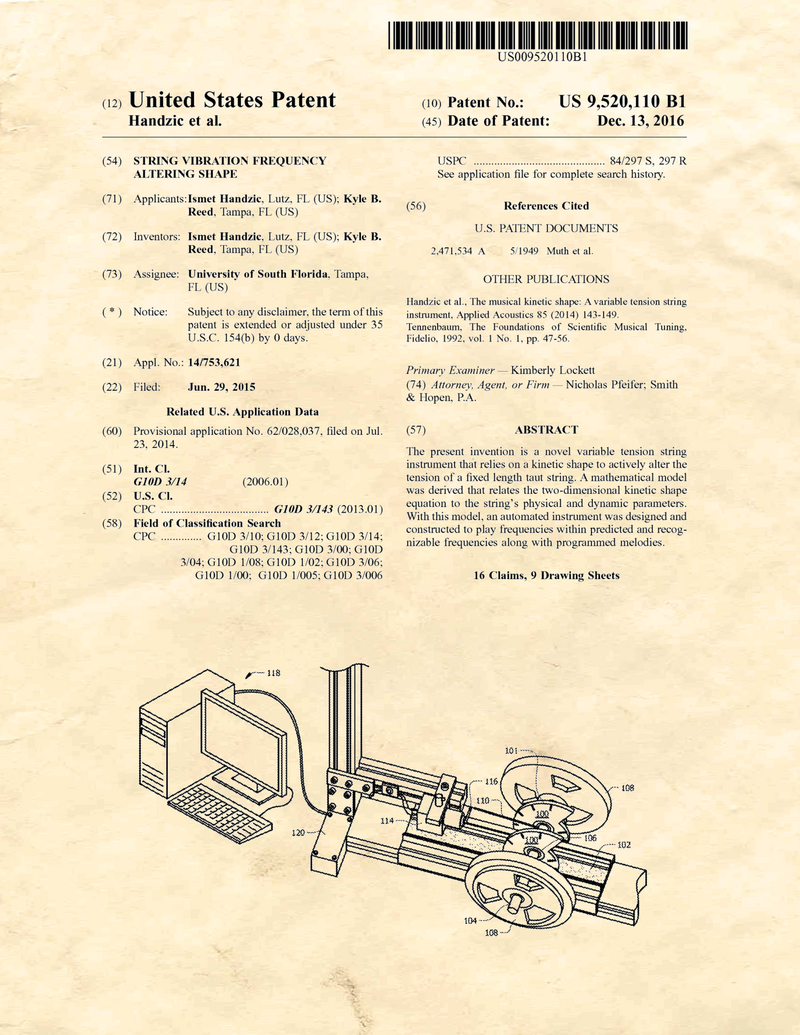
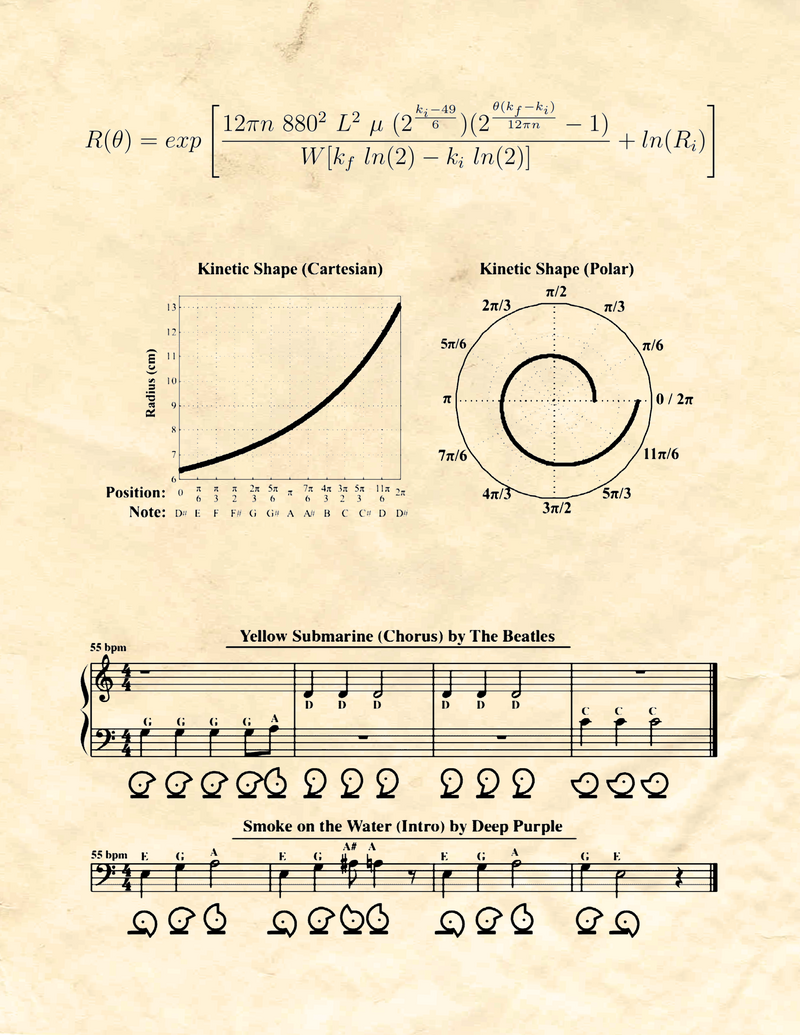
String Vibration Frequency Altering Shape
A novel variable tension string instrument that relies on a kinetic shape to actively alter the tension of a fixed length taut string. A mathematical model describes a 2D kinetic shape equation to the string's physical and dynamic parameters. With this model, an automated instrument is designed to play frequencies within predicted and recognizable frequencies along with programmed melodies.
Basically: A string instrument that changes string tension with a kinetic shape
Potential Applications: Musical instrument
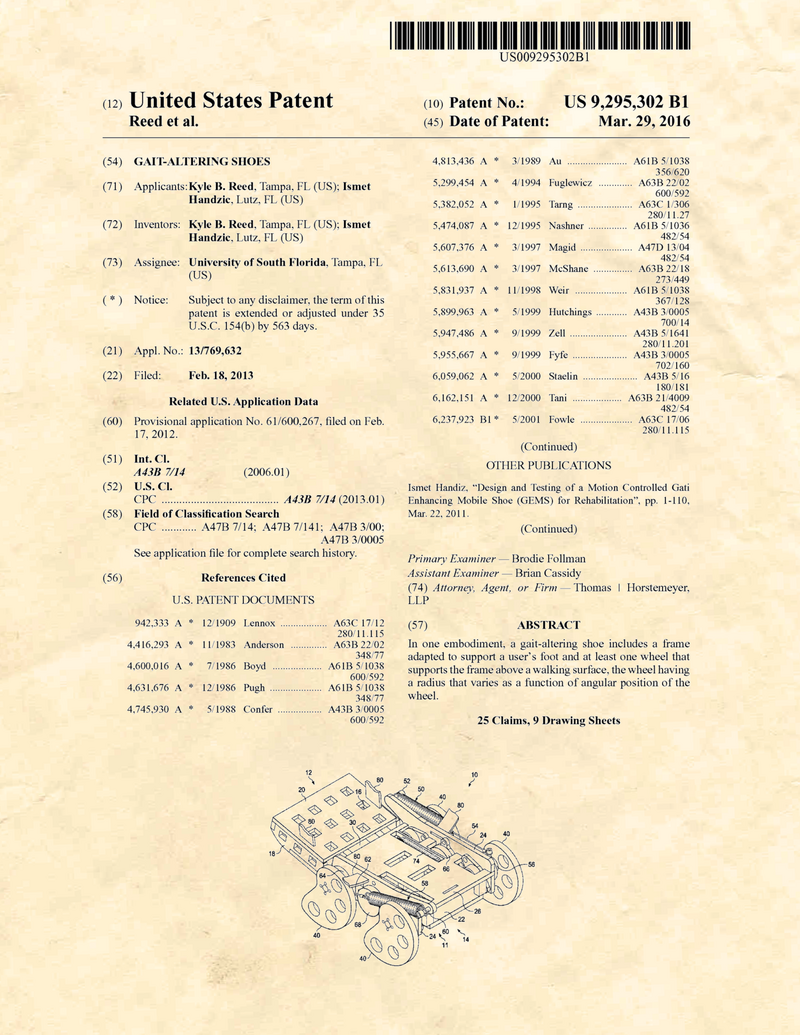
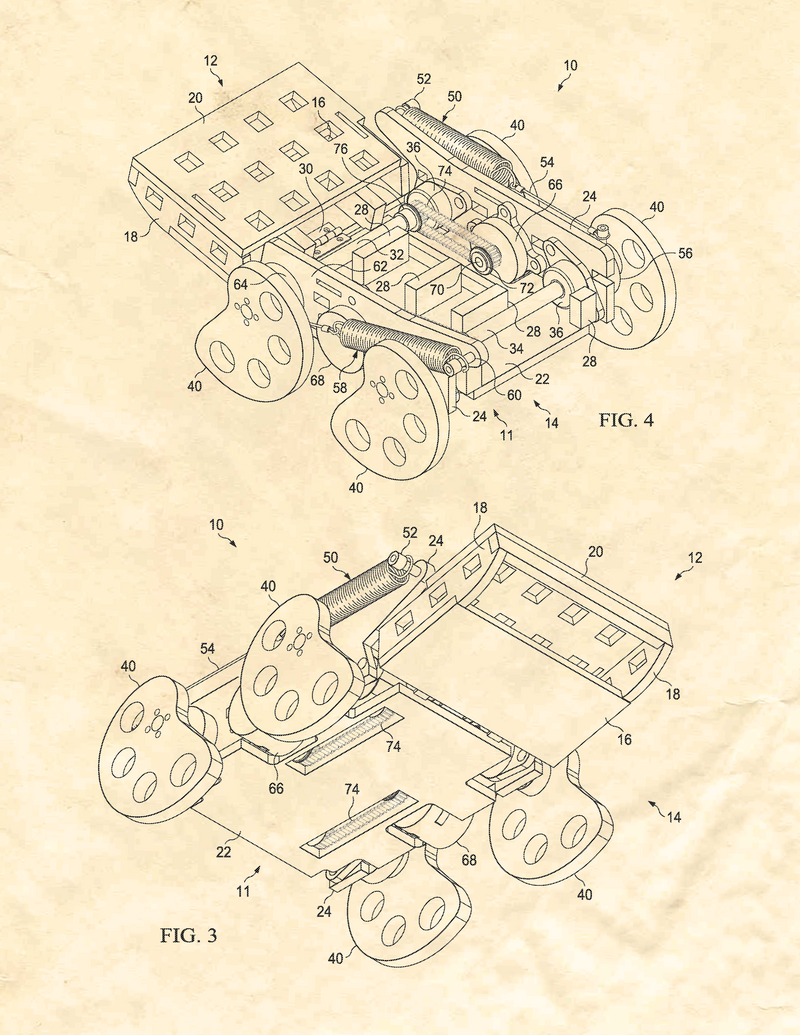
Gait Altering Shoe
A shoe-like device that is able to mimic a split-belt treadmill used for gait rehabilitation, correcting the walking pattern for individuals with central nervous system damage such as stroke.
Basically: A shoe for stroke rehabilitation
Potential Applications: Physical rehabilitation
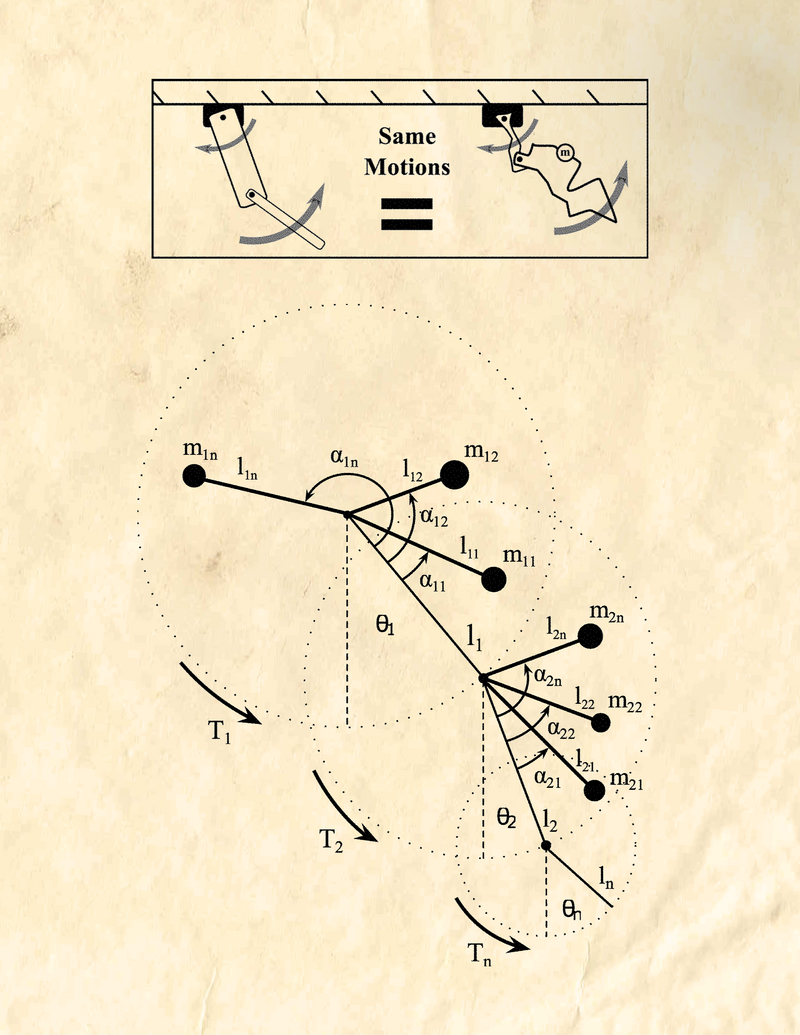
Systems and Methods for Synchronizing of Dissimilar and Uncoupled Rotating Systems
Technique to model and passively synchronize multiple dissimilar rotating system with single or multiple degrees of freedom (ie. double pendulum). Following this technique, two or more rotating systems that are not the same can move in the exact same way.
Basically: A method to make two rotating bodies move the same
Potential Applications: Human or robot movement manipulation, prosthetics, dynamic system model simplification